青岛市人工智能海洋技术创新中心
Open Menu
Close Menu
首页
关于我们
中心简介
组织框架
大事记
管理条例
合作伙伴
研究方向
联系我们
新闻动态
科研动态
学术活动
中心新闻
通知公告
人才队伍
中心人员
学术带头人
研究团队
研究人员
开放数据
开放数据中心
物理海洋类
海洋化学类
海洋生态类
海洋遥感类
研究成果
承接项目列表
论文发表列表
专利与获奖列表
社会服务
技术成果
成果转化
示范应用
ESC
All Results
Searching...
No results found
Clear search
↑↓
Navigate
↵
Select
Powered by Hugo Blox
郭瑶瑶
2023级数学硕士研究生
青岛科技大学
主要研究方向为非线性系统控制,对自适应控制、神经网络控制等方向有浓厚兴趣。
Adaptive Control
Fault Compensation-Based Adaptive Tracking Control for Nonlinear Systems with Actuator Saturation and Multiple Sensor Faults
郭瑶瑶
•
2025年7月1日
Adaptive Control
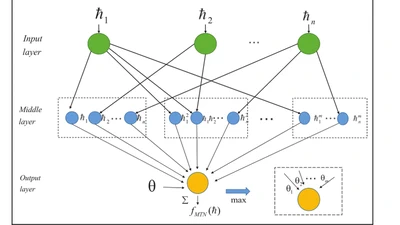
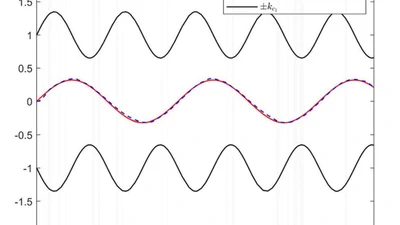
MTN‐Based Adaptive Finite‐Time Tracking Control for Switched Non‐Linear Systems With Time‐Varying State Function Constraints
孙京京
•
2025年1月20日