Event‐triggered Adaptive Tracking Control for Stochastic Nonlinear Systems under Predetermined Finite‐time Performance
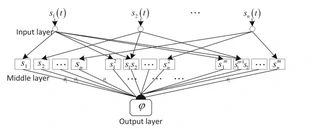 Image credit: Dong‐Mei Wang
Image credit: Dong‐Mei Wang摘要
In this paper, an event-triggered adaptive tracking control strategy is proposed for strict-feedback stochastic nonlinear systems with predetermined finite-time performance. Firstly, a finite-time performance function (FTPF) is introduced to describe the predetermined tracking performance. With the help of the error transformation technique, the original constrained tracking error is transformed into an equivalent unconstrained variable. Then, the unknown nonlinear functions are approximated by using the multi-dimensional Taylor networks (MTNs) in the backstepping design process. Meanwhile, an event-triggered mechanism with a relative threshold is introduced to reduce the communication burden between actuators and controllers. Furthermore, the proposed control strategy can ensure that all signals of the closed-loop system are bounded in probability and the tracking error is within a predefined range in a finite time. In the end, the effectiveness of the proposed control strategy is verified by two simulation examples.
类型
出版物
International Journal of Adaptive Control and Signal Processing
Adaptive Backstepping Method
Event‐triggered Control
Multi‐dimensional Taylor Networks
Predetermined Finite‐time Performance
Stochastic Nonlinear Systems
其他
Authors

Authors
正教授
博士,教授,硕士生导师,人工智能技术海洋场景化应用山东省工程研究中心副主任,青岛市人工智能海洋技术创新中心副主任,青岛科技大学数学与交叉研究院副院长。山东赛区数学建模竞赛专家组成员、山东省数学会理事、山东省应用统计学会理事、人工智能海洋学专业委员会委员。近年来,主持或参与国家自然科学基金、省自然基金、省教改项目等各类教学科研项目20多项,在国内外期刊发表学术论文80余篇,其中被SCI、EI检索70余篇,参编教材1部。指导学生参加全国大学生数学建模竞赛、中国研究生数学建模竞赛、美国大学生数学建模竞赛等各类竞赛获国家一等奖9项、国家二等奖29项、国家三等奖13项、山东省一等奖37项、山东省二等奖12项、山东省三等奖7项。指导本科生参加国家大学生创新计划项目4项。


Authors
讲师
博士,讲师,硕士生导师,2018年9月毕业于东南大学控制理论与控制工程专业,获工学博士学位。主要研究方向为非线性系统分析与综合、智能控制、容错控制、神经网络控制等。主持山东省自然科学基金青年项目1项,复杂工程系统测量与控制教育部重点实验室开放课题1项。指导学生参加全国大学生数学建模竞赛、中国研究生数学建模竞赛等各类竞赛获国家一等奖1项、国家二等奖3项、国家三等奖1项、山东省一等奖12项、山东省二等奖6项、山东省三等奖2项。目前是青岛市人工智能海洋技术创新中心、青岛科技大学数学与交叉科学研究院和数理学院智能控制与机器视觉技术研究中心核心成员。
Authors
Authors